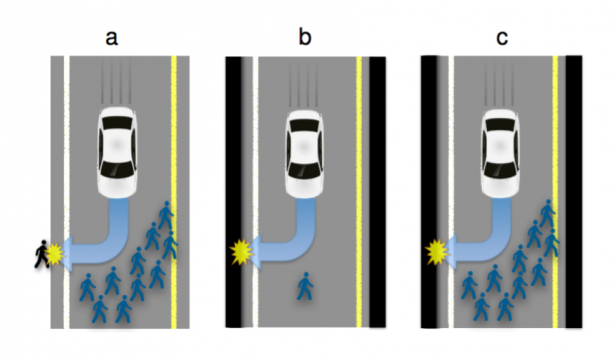
The wide adoption of self-driving, Autonomous Vehicles (AVs) promises to dramatically reduce the number of traffic accidents. Some accidents, though, will be inevitable, because some situations will require AVs to choose the lesser of two evils. For example, running over a pedestrian on the road or a passer-by on the side; or choosing whether to run over a group of pedestrians or to sacrifice the passenger by driving into a wall. It is a formidable challenge to define the algorithms that will guide AVs confronted with such moral dilemmas. In particular, these moral algorithms will need to accomplish three potentially incompatible objectives: being consistent, not causing public outrage, and not discouraging buyers. We argue to achieve these objectives, manufacturers and regulators will need psychologists to apply the methods of experimental ethics to situations involving AVs and unavoidable harm. To illustrate our claim, we report three surveys showing that laypersons are relatively comfortable with utilitarian AVs, programmed to minimize the death toll in case of unavoidable harm. We give special attention to whether an AV should save lives by sacrificing its owner, and provide insights into (i) the perceived morality of this self-sacrifice, (ii) the willingness to see this self-sacrifice being legally enforced, (iii) the expectations that AVs will be programmed to self-sacrifice, and (iv) the willingness to buy self-sacrificing AVs.